SSRの提供するロボット用ミドルウェア技術
RTミドルウェア
新エネルギー産業技術開発機構 (NEDO) や,産業技術総合研究所が仕様策定を行っているRTミドルウェアでの開発サポートが可能です.SSRは継続的にRTミドルウェアプロジェクトのサポートを行っています.RTミドルウェアでは,ソフトウェアモジュールを「RTコンポーネント」と呼び,この組み合わせでロボットを構築していきます.当社取締役はこの技術を使った開発に10年近く関わっており,多くの知見や開発リソースを保有しております.
RTミドルウェア
Mac OSX版のOpenRTM-aistの配布
OSXでRTミドルウェアを試したい方のためのパッケージを配布しています.
当然ですが,このパッケージやドキュメントで起きた不具合や損失等について,当社と当社の技術者は一切の責任を負いかねます.ご自身の責任でご利用いただける方のみお使いください.
当然ですが,このパッケージやドキュメントで起きた不具合や損失等について,当社と当社の技術者は一切の責任を負いかねます.ご自身の責任でご利用いただける方のみお使いください.
OpenRTM-aist C++版のC言語ラッパー
C++版で提供されているOpenRTM-aist C++をC言語関数でラッピングするためのツールとライブラリです.structを使った複雑なデータ型を専用のパーサーを使ってプリミティブ型のみを利用したC言語の関数にラッピングします.まだ開発中ですが,基本的なRTCでのデータ通信に対応しており,このラッパーを使えばC/C++以外の言語のラッパーをかぶせることで利用する幅が広がります.
OpenRTM-aistのC#言語ラッパー
C言語関数ラッパーをC#言語で利用する為のツールとライブラリです.
ツールおよびフレームワーク
RTミドルウェアを使った開発で利用出来るツールを公開しています.
wasanbonプロジェクト

これまで構築したRTミドルウェア用のツールやRTコンポーネントを統合し,新たなシステムインテグレーションツールとして開発中なのが「wasanbon」です.wasanbonを使えば,インターネット上に公開しているSSRのRTコンポーネントの収集やビルド,システム構築と実行を素早く行うことができます.
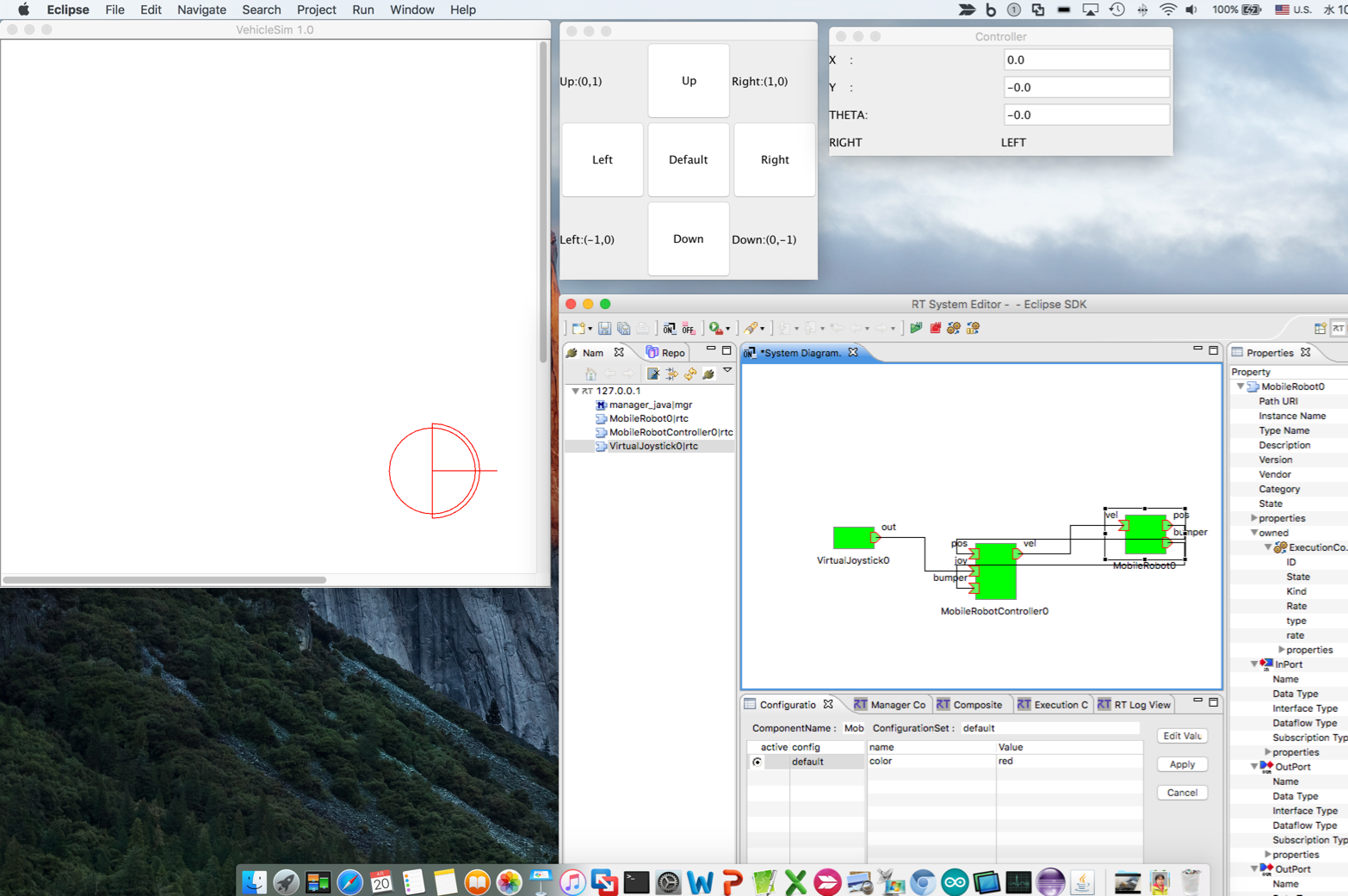
Mobile Robot Navigationフレームワーク
早稲田大学基幹理工学部尾形哲也研究室と共同で,RTミドルウェアで使える移動ロボット用ナビゲーションツールを開発しております.
このツールを使えば,WindowsのPCであっても,手軽に移動ロボットのナビゲーションを試すことができます.
エンジニアが手慣れた環境で開発できることから,効率よくお客様の皆様に開発を引き継ぐことができるツールとなっています.
このツールを使えば,WindowsのPCであっても,手軽に移動ロボットのナビゲーションを試すことができます.
エンジニアが手慣れた環境で開発できることから,効率よくお客様の皆様に開発を引き継ぐことができるツールとなっています.
Arduinoを RTコンポーネントとして使うツール「RTno」

Arduinoを簡単にRTコンポーネント化するためのツールとして「RTno (あーるてぃーの)」を開発しました.
このツールとライブラリを使えば,Arduinoのプログラムをテンプレートに沿って作成することで,他のRTコンポーネントと通信するArduinoを使ったRTコンポーネントが簡単につくれます.
>>>>RTnoについてくわしくはこちら
このツールとライブラリを使えば,Arduinoのプログラムをテンプレートに沿って作成することで,他のRTコンポーネントと通信するArduinoを使ったRTコンポーネントが簡単につくれます.
>>>>RTnoについてくわしくはこちら
RTコンポーネント
SSRでは,これまで開発してきたRTコンポーネントの一部を公開しています.
Mobilerobots社のPioneerシリーズ対応コンポーネント ARIARTC
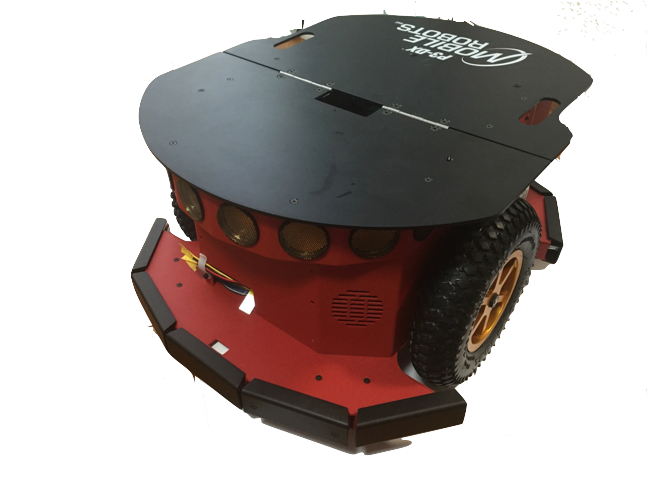
米国MobileRobots社のPioneer移動台車シリーズに対応したRTコンポーネントを公開しています.
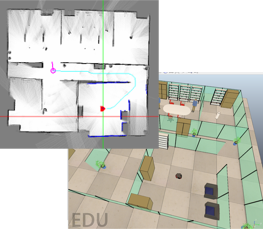
基本的にはデカルト座標系における速度指令と,オドメトリ推定のみのシンプルな機能ですが,インターフェースを標準化していることで,Mobile Robot Navigationフレームワークと連携して,SLAMやモンテカルロ位置推定を行うRTコンポーネントと連携して自律移動を行うシステムを手軽に構築することができます.
また,MobileSimなどのMobileRobots社の移動ロボットシミュレータと連携することで,実機ナシでも動作を確認することができます.
基本的にはデカルト座標系における速度指令と,オドメトリ推定のみのシンプルな機能ですが,インターフェースを標準化していることで,Mobile Robot Navigationフレームワークと連携して,SLAMやモンテカルロ位置推定を行うRTコンポーネントと連携して自律移動を行うシステムを手軽に構築することができます.
また,MobileSimなどのMobileRobots社の移動ロボットシミュレータと連携することで,実機ナシでも動作を確認することができます.
YPSpur対応移動台車制御RTコンポーネント
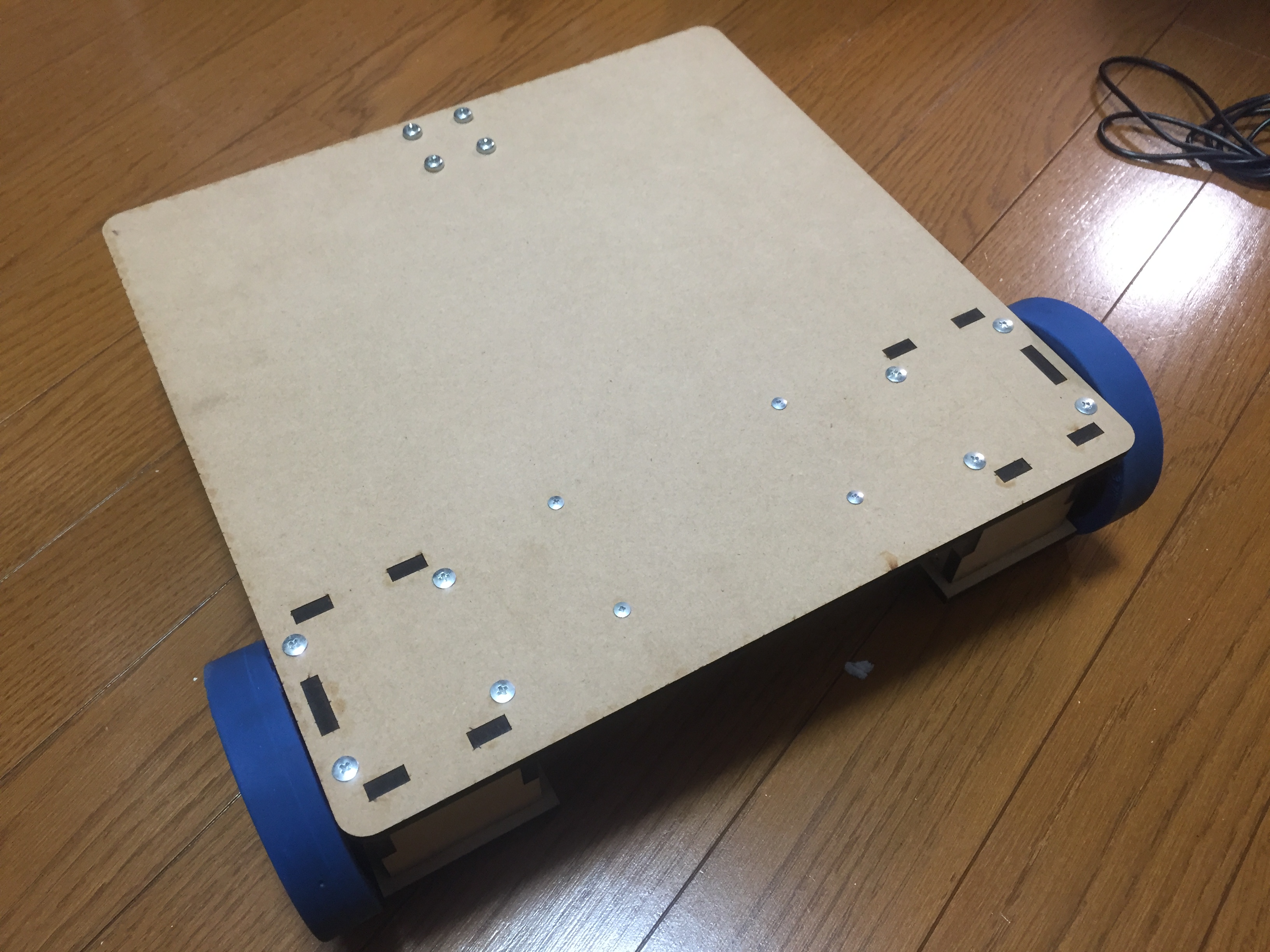
筑波大学油田研究室が中心になって開発された移動ロボット用制御ライブラリYPSpurを用いた移動ロボット制御用RTコンポーネントです.基本的にはデカルト座標系における速度指令と,オドメトリ推定のみのシンプルな機能ですが,T-frogプロジェクトで開発・販売されているモーターコントロール基板を使って,独自の移動ロボットを構築することができます.また,インターフェースを標準化していることで,Mobile Robot Navigationフレームワークと連携して,SLAMやモンテカルロ位置推定を行うRTコンポーネントと連携して自律移動を行うシステムを手軽に構築することができます.
Roomba移動台車制御RTコンポーネント

Roomba 500シリーズを使った移動台車を制御するためのRTコンポーネントです.Roombaの天板を外してシリアル通信を行うことで,移動ロボット同様にRoombaを使うことができます.当社でシリアル通信プロトコルから実装を行っており,Linuxだけでなく,Windows, OSXで動作確認を行っています.
弊社代表取締役寄稿の関連記事: 日経BP社 日経Linux, ルンバでロボットを作る! ハンダもコーディングも一切なし カメラを載せて自在に動かせる (特集 誰でもLinuxで楽しめる モノ作り超入門),日経Linux : Nikkei Linux 15(2), 51-58, 2013-02-00
>>>>libroombaについてくわしくはこちら
>>>>RoombaRTCについてくわしくはこちら
北陽電機URG RTコンポーネント
北陽電機様のレーザーレンジセンサ「URG」シリーズで使うことができるRTコンポーネントです.こちらもC++の通信ライブラリから弊社で開発しており,Windows, OSX, Linuxの環境で手軽に使うことができます.
HAGISONIC社StarGazerコンポーネント

韓国HAGISONIC社が販売しているStarGazerセンサモジュールのRTコンポーネントです.天井に赤外線マーカーを貼り付け,これを元にして移動ロボットの平面での位置を検出することができます.複数のマーカーの連携にモジュール本体で対応しているため,設置するだけで簡単に室内ナビゲーションが可能になります.こちらもC++の通信ライブラリから弊社で開発しており,Windows, OSX, Linuxの環境で手軽に使うことができます.
Microsoft社Kinect用RTコンポーネント

Microsoft社のKinectセンサーを利用するためのRTコンポーネントです.
>>>>くわしくはこちら
>>>>くわしくはこちら
Pallot社ARDrone2用RTコンポーネント
Pallot社のドローン「ARDrone2」を利用するためのRTコンポーネントです.
LeapMotion用RTコンポーネント

LeapMotionという机上で手先のモーションを検出するためのセンサを使うRTコンポーネントです.ロボットへの入力装置として利用することが可能です.
3次元マウス用RTコンポーネント
3D Connexion社の3次元マウス を使うためのRTコンポーネントです.